摘 要
探討了智能網(wǎng)聯(lián)汽車作為具身智能在交通領(lǐng)域具體應(yīng)用的技術(shù)現(xiàn)狀及發(fā)展趨勢(shì),分析了基于具身智能的智能網(wǎng)聯(lián)汽車的特點(diǎn)和典型應(yīng)用場(chǎng)景。進(jìn)而闡述了智能網(wǎng)聯(lián)汽車技術(shù)架構(gòu)的演進(jìn)過(guò)程,提出了車路云一體化的解決方案,為智能網(wǎng)聯(lián)技術(shù)賦能具身智能產(chǎn)業(yè)發(fā)展提供了可能的路徑表述。最后,全面分析了車輛群體智能的發(fā)展演進(jìn)以及智能網(wǎng)聯(lián)技術(shù)向具身智能行業(yè)賦能的具體方式,以云端智能為核心,構(gòu)建“車—路—云—網(wǎng)—圖”深度融合的智能體網(wǎng)絡(luò)。
0 1 概 述
在當(dāng)今數(shù)字化與智能化飛速發(fā)展的時(shí)代,人工智能(Artificial intelligence,AI)技術(shù)正以前所未有的速度滲透到各領(lǐng)域,推動(dòng)著人類社會(huì)的深刻變革。其中, “具身智能”(Embodied intelligence,EI)作為一種新興的、具有廣泛影響力的智能形態(tài),被廣泛認(rèn)為是新一波AI浪潮的核心方向[1]。2025年的政府工作報(bào)告首次將“具身智能”納入國(guó)家重點(diǎn)發(fā)展方向,提出要加快突破人形機(jī)器人[2]、具身智能等關(guān)鍵技術(shù)。從行業(yè)來(lái)看,OpenAI對(duì)Figure AI的戰(zhàn)略投資、特斯拉Optimus的持續(xù)迭代升級(jí)、英偉達(dá)積極構(gòu)建具身智能與人形機(jī)器人生態(tài),種種跡象表明,具身智能正處于快速發(fā)展的風(fēng)口。
智能網(wǎng)聯(lián)汽車,作為現(xiàn)代交通領(lǐng)域重要發(fā)展方向之一,正是具身智能在交通領(lǐng)域的重點(diǎn)體現(xiàn)。隨著傳感器技術(shù)、通信技術(shù)、人工智能算法的發(fā)展以及大數(shù)據(jù)處理能力的不斷提升,依托智能網(wǎng)聯(lián)系列技術(shù),汽車已從傳統(tǒng)交通工具轉(zhuǎn)變?yōu)榫哂懈叨戎悄芑妥灾餍缘囊苿?dòng)智能體[3]。它們通過(guò)車輛內(nèi)部多種傳感器感知周圍環(huán)境,并利用先進(jìn)的通信技術(shù)與其他車輛、路端基礎(chǔ)設(shè)施以及云端進(jìn)行實(shí)時(shí)數(shù)據(jù)交互,實(shí)現(xiàn)對(duì)交通環(huán)境的實(shí)時(shí)感知和動(dòng)態(tài)響應(yīng),并借助強(qiáng)大的云端計(jì)算平臺(tái)進(jìn)行復(fù)雜決策和控制,從而優(yōu)化交通流量、減少擁堵、降低事故風(fēng)險(xiǎn)[4-5]。在此過(guò)程中,云端計(jì)算平臺(tái)是中心智能體,每一輛智能網(wǎng)聯(lián)汽車為智能節(jié)點(diǎn),共同構(gòu)成了“車—路—云—網(wǎng)—圖”深度融合的智能體網(wǎng)絡(luò),進(jìn)而才能不斷學(xué)習(xí)和適應(yīng)復(fù)雜交通場(chǎng)景,優(yōu)化自身決策和控制策略。這種基于大規(guī)模智能體協(xié)同的交通系統(tǒng),正是具身智能在交通領(lǐng)域的重點(diǎn)發(fā)展方向,為解決交通領(lǐng)域諸多挑戰(zhàn)提供全新思路與方法。
然而,該方案也面臨諸多挑戰(zhàn)和問(wèn)題。例如,如何確保大規(guī)模智能體網(wǎng)絡(luò)間高效通信和數(shù)據(jù)共享,如何保障系統(tǒng)安全性、可靠性和隱私性,如何設(shè)計(jì)合理的控制策略以實(shí)現(xiàn)最優(yōu)交通管理效果,以及如何應(yīng)對(duì)復(fù)雜多變的交通環(huán)境和人類駕駛行為等。這些問(wèn)題不僅需從技術(shù)層面進(jìn)行深入研究和探索,還需從政策、法規(guī)等多角度進(jìn)行綜合考慮與統(tǒng)籌[6]。
基于此,本文將從基于具身智能的智能網(wǎng)聯(lián)汽車的特點(diǎn)、典型場(chǎng)景、技術(shù)架構(gòu)演進(jìn)以及群體智能的發(fā)展演進(jìn)入手,探討其行業(yè)優(yōu)勢(shì)、面臨挑戰(zhàn)和未來(lái)發(fā)展趨勢(shì),也探討了智能網(wǎng)聯(lián)領(lǐng)域技術(shù)能力積累向具身智能行業(yè)賦能的可能途徑,希望為具身智能研究者和從業(yè)者提供有益的參考和啟示。
0 2 基于具身智能的智能網(wǎng)聯(lián)汽車特點(diǎn)及應(yīng)用
汽車的發(fā)展先后經(jīng)歷人工控制階段、半自動(dòng)化階段和全自動(dòng)化階段,當(dāng)前正處于后2個(gè)階段的過(guò)渡期。智能網(wǎng)聯(lián)汽車通過(guò)云端、路端系統(tǒng)的賦能,結(jié)合車輛自身功能,具備以下全新特點(diǎn)。
2.1 執(zhí)行端的全自動(dòng)化
執(zhí)行端的全自動(dòng)化主要包括以下幾個(gè)方面。
a)高度自主性。基于具身智能的智能網(wǎng)聯(lián)汽車具備高度自主性,且能根據(jù)復(fù)雜的交通環(huán)境和多變的道路狀況,獨(dú)立做出合理的決策并執(zhí)行相應(yīng)的操作。車輛可以自主判斷加速、減速、變道、轉(zhuǎn)彎等,無(wú)需人類駕駛員頻繁干預(yù)。
b)精準(zhǔn)控制能力。基于具身智能的智能網(wǎng)聯(lián)車輛控制精度極高,能夠精確地控制車輛的行駛參數(shù)。在速度控制方面,可以根據(jù)道路限速、交通流量等因素,精準(zhǔn)地維持在合適的車速;在轉(zhuǎn)向控制上,能夠精確地調(diào)整車輛的行駛軌跡,實(shí)現(xiàn)精準(zhǔn)的車道保持和轉(zhuǎn)彎操作。
c)快速反應(yīng)能力。當(dāng)車輛的傳感器檢測(cè)到前方有障礙物或突發(fā)危險(xiǎn)時(shí),執(zhí)行端可以在極短的時(shí)間內(nèi)做出反應(yīng),如緊急制動(dòng)、緊急避讓等,其反應(yīng)速度遠(yuǎn)遠(yuǎn)超過(guò)人類駕駛員,能夠有效避免碰撞事故的發(fā)生。
d)多模態(tài)融合控制。基于具身智能的智能網(wǎng)聯(lián)車輛,能結(jié)合云端智能網(wǎng)聯(lián)綜合能力平臺(tái),將多種感知信息進(jìn)行融合處理,綜合考慮車輛及周邊視覺(jué)、雷達(dá)、等多種傳感器數(shù)據(jù)以及車輛自身動(dòng)力學(xué)狀態(tài)等信息,做出更加全面、準(zhǔn)確的控制決策。
典型場(chǎng)景如智慧泊車,通過(guò)協(xié)同感知、協(xié)同定位、協(xié)同規(guī)劃和協(xié)同控制等技術(shù)實(shí)現(xiàn)高效、智能的停車管理和服務(wù)(見(jiàn)圖1)。智慧泊車的技術(shù)核心是根據(jù)多源傳感器異構(gòu)算法聯(lián)合感知的異步動(dòng)態(tài)協(xié)同感知系統(tǒng),基于場(chǎng)側(cè)的無(wú)線通信技術(shù)和車輛即時(shí)定位與地圖構(gòu)建技術(shù)的協(xié)同定位系統(tǒng),同時(shí)基于先驗(yàn)地圖和實(shí)時(shí)路況的全局路徑調(diào)度和車輛感知的局部軌跡規(guī)劃的協(xié)同系統(tǒng),以及場(chǎng)端原始感知數(shù)據(jù)及預(yù)測(cè)與車輛實(shí)時(shí)規(guī)劃軌跡的實(shí)時(shí)干涉控制系統(tǒng),實(shí)現(xiàn)車路云一體化的泊車服務(wù)。
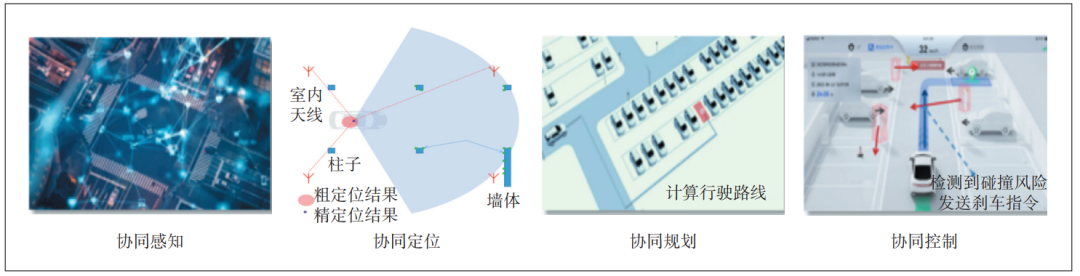
圖1 智慧泊車技術(shù)核心
2.2 交互端的高智能化
交互端的高智能化主要包括以下幾個(gè)方面。
a)深層次語(yǔ)義解析。基于具身智能的智能網(wǎng)聯(lián)車輛,能對(duì)人類語(yǔ)言進(jìn)行深層次語(yǔ)義解析,不僅理解語(yǔ)言的字面意思,還能解讀語(yǔ)言背后人的意圖、情感和上下文信息。
b)自然語(yǔ)言交互能力。具備強(qiáng)大的自然語(yǔ)言交互能力,能與人類進(jìn)行流暢、自然的對(duì)話,能理解各種不同的語(yǔ)言表達(dá)方式。
c)上下文理解與記憶能力。能夠理解語(yǔ)言的上下文信息,并具有一定記憶能力。車輛能夠根據(jù)之前對(duì)話內(nèi)容和語(yǔ)境,理解當(dāng)前指令或問(wèn)題的具體含義。
d)多意圖理解與處理。能夠同時(shí)理解并處理多個(gè)意圖。車輛能準(zhǔn)確地識(shí)別并按照優(yōu)先級(jí)順序執(zhí)行相應(yīng)操作。
典型場(chǎng)景如智慧座艙(見(jiàn)圖2),通過(guò)融合多種先進(jìn)技術(shù),如大語(yǔ)言模型、多模態(tài)感知、計(jì)算機(jī)視覺(jué)等,為用戶提供更加便捷、舒適和安全的駕乘體驗(yàn)。

圖2 智慧座艙技術(shù)核心
2.3 服務(wù)端的自主化
服務(wù)端的自動(dòng)化主要包括如下幾個(gè)方面。
a)全方位車輛狀態(tài)監(jiān)測(cè)。系統(tǒng)能實(shí)現(xiàn)對(duì)車輛各關(guān)鍵部件和系統(tǒng)運(yùn)行狀態(tài)的全面、實(shí)時(shí)監(jiān)測(cè),包括發(fā)動(dòng)機(jī)、變速箱等關(guān)鍵部件的性能參數(shù),車輛的行駛里程、油耗等運(yùn)行數(shù)據(jù)以及智能網(wǎng)聯(lián)駕駛相關(guān)數(shù)據(jù)。通過(guò)分析監(jiān)測(cè)數(shù)據(jù),可及時(shí)發(fā)現(xiàn)潛在故障隱患,提前預(yù)警并采取相應(yīng)措施,確保車輛安全可靠運(yùn)行。
b)智能環(huán)境感知與風(fēng)險(xiǎn)預(yù)警。主動(dòng)監(jiān)測(cè)系統(tǒng)能實(shí)時(shí)感知車輛周圍環(huán)境的變化,并對(duì)潛在的風(fēng)險(xiǎn)進(jìn)行預(yù)警。例如,通過(guò)傳感器監(jiān)測(cè)到前方道路出現(xiàn)結(jié)冰、積水、塌方等危險(xiǎn)情況時(shí),及時(shí)向駕駛員發(fā)出警報(bào),并建議駕駛員減速慢行或改變行駛路線。
c)個(gè)性化主動(dòng)服務(wù)。基于對(duì)車輛狀態(tài)和用戶習(xí)慣的監(jiān)測(cè)與分析,能為用戶提供個(gè)性化的主動(dòng)服務(wù)。
例如在用戶到達(dá)目的地后,主動(dòng)向用戶提供附近停車場(chǎng)、充電樁等信息。典型場(chǎng)景如“人—車—家”全場(chǎng)景智慧互聯(lián)(見(jiàn)圖3),該場(chǎng)景依托智能網(wǎng)聯(lián)汽車,可實(shí)現(xiàn)跨行業(yè)交叉融合創(chuàng)新,打造以車主為中心、跨場(chǎng)景一體化的服務(wù)體驗(yàn),并打通不同系統(tǒng)數(shù)據(jù)互通,實(shí)現(xiàn)能力聚合。

圖3 “人—車—家”全場(chǎng)景智慧互聯(lián)技術(shù)核心
0 3 技術(shù)架構(gòu)演進(jìn)
智能網(wǎng)聯(lián)汽車的技術(shù)演進(jìn)歷程一般分為3個(gè)階段(見(jiàn)圖4)。第1階段是單模塊控制階段,車輛各個(gè)關(guān)鍵部件如動(dòng)力系統(tǒng)、制動(dòng)系統(tǒng)等都各自配備獨(dú)立的控制模塊,模塊之間協(xié)同性較差,只能實(shí)現(xiàn)基礎(chǔ)、相對(duì)簡(jiǎn)單的功能,例如簡(jiǎn)單的定速巡航,車輛無(wú)法自主應(yīng)對(duì)復(fù)雜路況;第2階段是半自動(dòng)控制階段,部分駕駛?cè)蝿?wù)可以由車輛自動(dòng)完成,例如記憶泊車功能,車輛能夠自動(dòng)識(shí)別停車位并精準(zhǔn)控制轉(zhuǎn)向、速度等完成泊車動(dòng)作,但仍需要駕駛員參與;第3階段是全自動(dòng)控制階段,車輛已達(dá)成真正意義上的高度智能化與自主化。車輛依托自身及周邊環(huán)境多傳感器融合技術(shù)構(gòu)建起全方位、高精度的環(huán)境感知體系,并基于云端智能網(wǎng)聯(lián)平臺(tái)的強(qiáng)大賦能,具備強(qiáng)大的駕駛決策能力,可實(shí)時(shí)調(diào)整行駛策略以應(yīng)對(duì)復(fù)雜多變交通場(chǎng)景,全程無(wú)需駕駛員任何干預(yù)。

圖4 智能網(wǎng)聯(lián)車輛技術(shù)架構(gòu)演進(jìn)歷程
隨著車輛智能化水平的不斷提高,車載計(jì)算設(shè)備的算力逐漸難以滿足復(fù)雜路況下實(shí)時(shí)處理大量數(shù)據(jù)的需求,既是成本瓶頸,也是能力瓶頸。為解決這一問(wèn)題,行業(yè)研究出車路云一體化的技術(shù)演進(jìn)路線(見(jiàn)圖5)。此方案體系下,車輛通過(guò)高速穩(wěn)定的通信網(wǎng)絡(luò)與云端服務(wù)器、道路感知設(shè)備進(jìn)行實(shí)時(shí)數(shù)據(jù)交互。云端強(qiáng)大的計(jì)算能力既可對(duì)車輛上傳的大量傳感器數(shù)據(jù)進(jìn)行快速處理和分析,也可處理道路感知設(shè)備上報(bào)的實(shí)時(shí)道路信息和交通狀況。平臺(tái)綜合分析后將決策指令及時(shí)反饋給車輛,從而輔助車輛做出更精準(zhǔn)的決策。車路云一體化的技術(shù)方案可有效彌補(bǔ)車輛自身算力不足,進(jìn)一步提升智能網(wǎng)聯(lián)車輛的運(yùn)行效率和安全性,并為降低智能駕駛成本推動(dòng)智能網(wǎng)聯(lián)汽車快速普及,助力智能交通發(fā)展提供堅(jiān)實(shí)基礎(chǔ)。
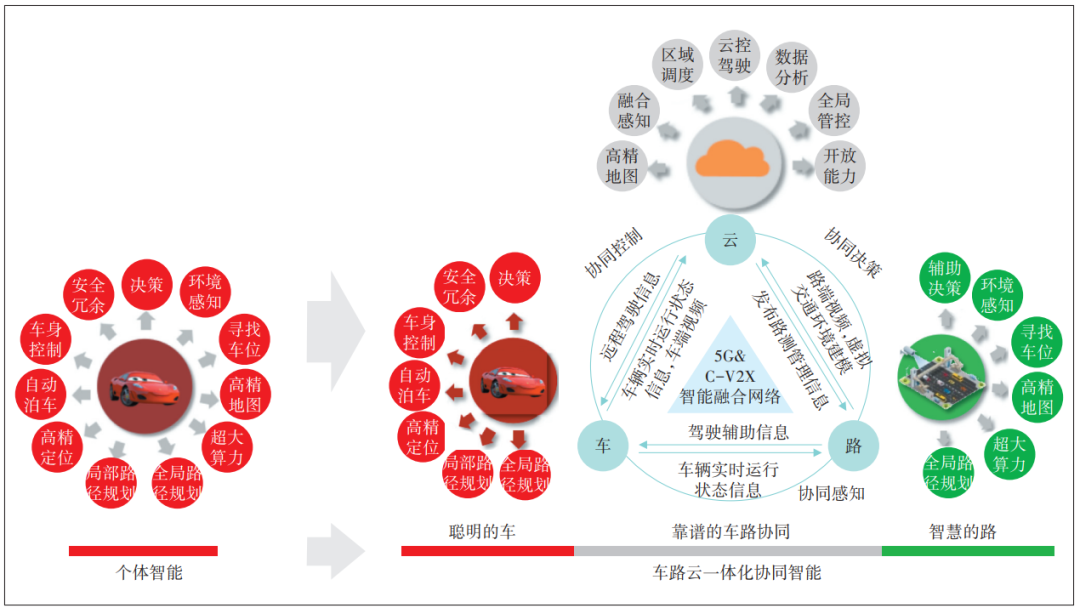
圖5 車路云一體化技術(shù)方案
0 4 群體智能的發(fā)展與演進(jìn)
4.1 群體智能與車輛群體智能的演進(jìn)
群體智能(Swarm intelligence),早期多用于描述細(xì)胞機(jī)器人去中心化的自組織智能行為[9],核心在于通過(guò)個(gè)體的分布式?jīng)Q策與協(xié)作,涌現(xiàn)出超越個(gè)體智慧的群體智慧。目前,群體智能已被廣泛應(yīng)用于環(huán)境監(jiān)測(cè)[10]、空間搜索[11]、緊急救援[12]以及軍事作戰(zhàn)[13]等領(lǐng)域。在智能網(wǎng)聯(lián)汽車領(lǐng)域,車輛群體智能(VehicleGroup Intelligence,VGI)的演進(jìn),將主要經(jīng)歷如下3個(gè)階段。
a)單車智能階段。以單車自主決策為核心,依賴車載傳感器和規(guī)則驅(qū)動(dòng)算法實(shí)現(xiàn)基礎(chǔ)環(huán)境感知與局部路徑規(guī)劃。此階段信息孤島效應(yīng)顯著,協(xié)同能力弱,難以應(yīng)對(duì)復(fù)雜動(dòng)態(tài)場(chǎng)景。
b)局部協(xié)同階段。通過(guò)V2X(Vehicle-toEverything)通信技術(shù)實(shí)現(xiàn)車—車(Vehicle to Vehicle,V2V)、車—路(Vehicle-to-Infrastructure,V2I)之間信息共享,實(shí)現(xiàn)多交通主體的局部協(xié)同。
c)全局群體智能階段。基于“車—路—云”協(xié)同框架,多智能體通過(guò)分布式通信與協(xié)作,實(shí)現(xiàn)交通自組織和自適應(yīng)優(yōu)化,并支持城市級(jí)大規(guī)模交通流優(yōu)化、動(dòng)態(tài)路權(quán)分配等復(fù)雜任務(wù)。
4.2 車輛群體智能架構(gòu)與關(guān)鍵技術(shù)
智能網(wǎng)聯(lián)汽車領(lǐng)域的群體智能系統(tǒng)引入,一般采用“感知—認(rèn)知—通信—決策—控制—反饋”分層架構(gòu)。
a)感知層。主要通過(guò)多模態(tài)融合感知(如激光雷達(dá)、視覺(jué)、毫米波雷達(dá)等),構(gòu)建動(dòng)態(tài)的環(huán)境感知模型,支持對(duì)多個(gè)交通智能體群體行為的預(yù)測(cè)和決策。
b)認(rèn)知層。包含對(duì)多智能體的協(xié)同意圖的挖掘以及其協(xié)同資源需求的剖析,多智能體協(xié)同需求主動(dòng)認(rèn)知。
c)通信層。支持多種通信協(xié)議,進(jìn)行多智能體間的實(shí)時(shí)數(shù)據(jù)傳輸與同步,實(shí)現(xiàn)環(huán)境感知信息共享,提供超可靠低時(shí)延通信保障。
d)決策層。負(fù)責(zé)分析感知與認(rèn)知層的信息,結(jié)合任務(wù)目標(biāo)與約束條件,依賴以機(jī)器學(xué)習(xí)、大模型等為核心的機(jī)器智能決策算法,完成任務(wù)規(guī)劃、推理分析和協(xié)同決策,生成相應(yīng)的控制指令。
e)協(xié)同控制層。負(fù)責(zé)執(zhí)行具體的控制指令。
f)反饋層。主要實(shí)現(xiàn)多交通智能體的自主學(xué)習(xí)演進(jìn),通過(guò)與環(huán)境的交互與反饋,不斷優(yōu)化,提升智能體自組織、自適應(yīng)能力。
4.3 車輛群體智能典型應(yīng)用場(chǎng)景
智能網(wǎng)聯(lián)汽車的群體智能的典型場(chǎng)景應(yīng)用舉例如下。
a)多車協(xié)同緊急避險(xiǎn)[14]。在突發(fā)危險(xiǎn)(如障礙物突現(xiàn)、前車急剎、行人闖入等)情況下,通過(guò)車輛群智協(xié)同實(shí)時(shí)共享環(huán)境信息,協(xié)同決策,同步調(diào)整速度、方向或路徑,實(shí)現(xiàn)事故風(fēng)險(xiǎn)或損失最小化的智能化應(yīng)急響應(yīng)模式。
b)城市交通流全局優(yōu)化。車路云協(xié)同框架下,通過(guò)車輛和路側(cè)實(shí)時(shí)采集車流數(shù)據(jù),云端實(shí)現(xiàn)車輛優(yōu)先級(jí)控制、信號(hào)燈動(dòng)態(tài)調(diào)整與速度引導(dǎo),并通過(guò)車—車、車—路、車—云廣播請(qǐng)求,優(yōu)化城市交通。當(dāng)前,正處于技術(shù)概念走向產(chǎn)業(yè)化落地的階段,核心是重構(gòu)“感知—通信—決策—控制—反饋”閉環(huán)的交通系統(tǒng)新范式,有望推動(dòng)交通系統(tǒng)從單體智能向群體智能的躍遷[15]。
0 5 智能網(wǎng)聯(lián)技術(shù)賦能具身智能行業(yè)
通過(guò)近10年來(lái)的技術(shù)積累,智能網(wǎng)聯(lián)行業(yè)已儲(chǔ)備了可向具身智能行業(yè)賦能的雄厚基礎(chǔ),這里以中國(guó)聯(lián)通智網(wǎng)科技為例進(jìn)行簡(jiǎn)要介紹。聯(lián)通智網(wǎng)作為聯(lián)通汽車信息化專業(yè)子公司,已在智能網(wǎng)聯(lián)方向擁有近10年的研發(fā)積累,形成了相關(guān)核心技術(shù)、能力體系和生態(tài)協(xié)同的優(yōu)勢(shì),包括全域覆蓋的5G專網(wǎng)、感知融合、云控平臺(tái)及跨行業(yè)生態(tài)整合能力等方面,可面向具身機(jī)器人實(shí)現(xiàn)能力輸出,提供“通信—感知—決策”閉環(huán)賦能,其賦能路徑可概括為:通信為脈→算力為核→AI為腦→演進(jìn)為能。
5.1 通信網(wǎng)絡(luò):構(gòu)建具身機(jī)器人的“神經(jīng)傳導(dǎo)系統(tǒng)”
中國(guó)聯(lián)通構(gòu)建了覆蓋30多個(gè)城市的5G/V2X融合網(wǎng)絡(luò),端到端時(shí)延小于20 ms,支持10萬(wàn)以上終端的并發(fā)連接。該網(wǎng)絡(luò)可無(wú)縫遷移至具身機(jī)器人領(lǐng)域,為機(jī)器人“小腦”提供毫秒級(jí)指令傳輸,滿足快反應(yīng)場(chǎng)景需求。多機(jī)協(xié)同技術(shù)通過(guò)R2R通信協(xié)議,實(shí)現(xiàn)機(jī)器人集群的任務(wù)調(diào)度,如倉(cāng)儲(chǔ)物流中的編隊(duì)運(yùn)輸與協(xié)同分揀。此外,通信連接管理平臺(tái)支持5G、V2X、Wi-Fi、衛(wèi)星通信等多制式通信融合接入,解決具身機(jī)器人因場(chǎng)景切換導(dǎo)致的網(wǎng)絡(luò)中斷問(wèn)題。
5.2 算力基礎(chǔ)設(shè)施:支撐端—邊—云協(xié)同智能
“中心—區(qū)域—邊緣”三級(jí)算網(wǎng)架構(gòu),整合了全國(guó)270+骨干云池與300+MEC邊緣節(jié)點(diǎn),實(shí)現(xiàn)算力資源的動(dòng)態(tài)分配。行業(yè)首個(gè)算網(wǎng)調(diào)度平臺(tái)支持全國(guó)270多個(gè)骨干云池按需使用,具備算力感知、調(diào)度、多云對(duì)接、網(wǎng)絡(luò)監(jiān)控等功能。對(duì)于具身機(jī)器人的快反應(yīng)場(chǎng)景,本地MEC節(jié)點(diǎn)可提供1~20 TOPS算力,支持機(jī)器人關(guān)節(jié)控制;針對(duì)復(fù)雜決策場(chǎng)景,云端智能體可調(diào)用超算資源(100+TOPS),完成AGV路徑全局優(yōu)化或群體任務(wù)調(diào)度。
5.3 感知與決策:強(qiáng)化機(jī)器人的“大腦—小腦”協(xié)同
依托“5G+MEC”分布式智能融合感知系統(tǒng),協(xié)助機(jī)器人實(shí)現(xiàn)周邊環(huán)境感知,融合北斗三代+5G基站定位(精度≤10 cm),并結(jié)合觸覺(jué)、嗅覺(jué)傳感器技術(shù),為機(jī)器人提供厘米級(jí)空間定位及多維環(huán)境感知能力。數(shù)據(jù)驅(qū)動(dòng)訓(xùn)練依托高質(zhì)量多模態(tài)數(shù)據(jù)集構(gòu)建,支撐機(jī)器人運(yùn)動(dòng)軌跡優(yōu)化訓(xùn)練。此外,結(jié)合10年積累的汽車行業(yè)數(shù)據(jù)以及具體場(chǎng)景,訓(xùn)練出運(yùn)營(yíng)大模型、座艙大模型、交通大模型等,為車企提質(zhì)增效,提升車主出行體驗(yàn)。
5.4 未來(lái)方向:從“單機(jī)智能”到“群體智能”
在從“單機(jī)智能”到“群體智能”的演進(jìn)中,智網(wǎng)科技牽頭開(kāi)展面向智能網(wǎng)聯(lián)的5G-A通感算一體能力驗(yàn)證,并探索面向6G的空天地一體化網(wǎng)絡(luò)演進(jìn),同時(shí)聯(lián)合產(chǎn)業(yè)相關(guān)方,結(jié)合低軌衛(wèi)星通信,實(shí)現(xiàn)野外勘探機(jī)器人的全域覆蓋。此外,探索構(gòu)建Robot-toEverything通信樞紐,支持機(jī)器人—基礎(chǔ)設(shè)施—人—網(wǎng)絡(luò)的實(shí)時(shí)交互(R2X),推動(dòng)家庭、工業(yè)場(chǎng)景的群體智能協(xié)同。
0 6 總 結(jié)
本文探討了智能網(wǎng)聯(lián)車輛作為具身智能在交通領(lǐng)域的技術(shù)現(xiàn)狀與發(fā)展趨勢(shì)。智能網(wǎng)聯(lián)車輛正從單車智能向車路云協(xié)同轉(zhuǎn)變,其技術(shù)架構(gòu)不斷演進(jìn),以滿足車載算力集中、車路云多源算力分配等需求。然而該領(lǐng)域仍面臨諸多挑戰(zhàn),在技術(shù)層面,異構(gòu)通信和動(dòng)態(tài)資源調(diào)度等難題亟待突破;在安全與可靠性方面,保障系統(tǒng)安全性、可靠性和隱私性是廣泛應(yīng)用的關(guān)鍵瓶頸,需從技術(shù)、政策、法規(guī)等多角度綜合考慮;在實(shí)際應(yīng)用中,復(fù)雜交通環(huán)境增加了決策和控制的難度。
展望未來(lái),智能網(wǎng)聯(lián)車輛的發(fā)展前景廣闊。車路云一體化技術(shù)將更加成熟,群體智能的應(yīng)用將推動(dòng)交通系統(tǒng)從單體智能向群體智能躍遷。通過(guò)“感知—通信—決策—控制—反饋”閉環(huán)重構(gòu)交通系統(tǒng)范式,有望實(shí)現(xiàn)城市級(jí)交通流全局優(yōu)化和動(dòng)態(tài)路權(quán)分配。未來(lái)的研究將聚焦于突破關(guān)鍵技術(shù)難題,構(gòu)建“車—路—云—網(wǎng)—圖”深度融合的智能體網(wǎng)絡(luò),加速產(chǎn)業(yè)化進(jìn)程。同時(shí),需加強(qiáng)跨學(xué)科研究,推動(dòng)技術(shù)全面發(fā)展。
我國(guó)智能網(wǎng)聯(lián)汽車正處于快速發(fā)展和落地實(shí)施階段,為具身智能的發(fā)展提供了重要場(chǎng)景。歷經(jīng)近10年的技術(shù)攻關(guān)、應(yīng)用場(chǎng)景、標(biāo)準(zhǔn)規(guī)范、商業(yè)模式探索與積累,行業(yè)培育出眾多優(yōu)秀企業(yè),為具身智能的發(fā)展提供了技術(shù)能力支撐。
參考文獻(xiàn)
[1] 劉馨竹,王亞珅,石曉軍,等.2024年具身智能技術(shù)發(fā)展分析[J].無(wú)人系統(tǒng)技術(shù),2025,8(2):108-122.
[2] 陶永,萬(wàn)嘉昊,王田苗,等.構(gòu)建具身智能新范式:人形機(jī)器人技術(shù)現(xiàn)狀及發(fā)展趨勢(shì)綜述[J/OL]. 機(jī)械工程學(xué)報(bào),2025:1-27[2025-05-16].http://kns.cnki.net/kcms/detail/11.2187.TH.20250508.1039.002.html.
[3] 白入文,張蔚敏,石霖,等.基于具身智能的智能制造創(chuàng)新體系與應(yīng)用模式研究[J]. 數(shù)字化轉(zhuǎn)型,2025,2(5):4-14.
[4] 張新鈺,盧毅果,高鑫,等.向智能網(wǎng)聯(lián)汽車的車路協(xié)同感知技術(shù)及發(fā)展趨勢(shì)[J].自動(dòng)化學(xué)報(bào),2025,51(2):233-248.
[5] 丁飛,張楠,李升波,等. 智能網(wǎng)聯(lián)車路云協(xié)同系統(tǒng)架構(gòu)與關(guān)鍵技術(shù)研究綜述[J].自動(dòng)化學(xué)報(bào),2022,48(12):2863-2885.
[6] 劉飛,吳輝.具身智能的內(nèi)在意蘊(yùn)、現(xiàn)實(shí)梗阻與紓解理路[J/OL].西南交通大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版),2025:1-11[2025-05-16].http://kns.cnki.net/kcms/detail/51.1586.C.20250409.1514.002.html.
[7] 李孟遠(yuǎn).汽車智能化駕駛系統(tǒng)的發(fā)展趨勢(shì)[J].汽車維修技師,2023(9):115-116.
[8] 李克強(qiáng),常雪陽(yáng),李家文,等.智能網(wǎng)聯(lián)汽車云控系統(tǒng)及其實(shí)現(xiàn)[J]. 汽車工程,2020,42(12):1595-1605.
[9] BENI G,WANG J. Swarm intelligence in cellular robotic systems[C]//Robots and Biological Systems:Towards a New Bionics?. Berlin:Springer,1993:703-712.
[10] DUARTE M,GOMES J,COSTA V,et al. Application of swarm robot?ics systems to Marine environmental monitoring[C]//OCEANS 2016- Shanghai. Shanghai:IEEE,2016:1-8.
[11] TAK M H,JOO Y H. Behavior control algorithm for space search based on swarm robots[J].The Transactions of the Korean Institute of Electrical Engineers,2011,60(11):2152-2156.
[12] CARRILLO-ZAPATA D,MILNER E,HIRD J,et al. Mutual shaping in swarm robotics:user studies in fire and rescue,storage organization,and bridge inspection[J]. Frontiers in Robotics and AI,2020,7:53.
[13] 李磊,王彤,胡勤蓮,等. DARPA拒止環(huán)境中協(xié)同作戰(zhàn)項(xiàng)目白軍網(wǎng)絡(luò)研究[J].航天電子對(duì)抗,2018,34(6):54-59.
[14] 劉雨桐.車車通信環(huán)境下考慮駕駛意圖共享的車輛集群避撞預(yù)警算法[D].北京:北京交通大學(xué),2022.
[15] 雷鳴,鄔小魯.基于云計(jì)算的一體化車路云協(xié)同系統(tǒng)方法研究[J].信息記錄材料,2024,25(11):189-192.
作者簡(jiǎn)介
續(xù)宇潔,畢業(yè)于長(zhǎng)安大學(xué),工程師,碩士,主要從事車聯(lián)網(wǎng)和自動(dòng)駕駛標(biāo)準(zhǔn)制定工作;
周光濤,畢業(yè)于北京郵電大學(xué),教授級(jí)高級(jí)工程師,博士,主要從事車聯(lián)網(wǎng)和人工智能研發(fā)工作;
溫桂,畢業(yè)于德國(guó)伊爾梅瑙工業(yè)大學(xué),工程師,碩士,主要從事車聯(lián)網(wǎng)和自動(dòng)駕駛研發(fā)工作;
程軍峰,畢業(yè)于中國(guó)科學(xué)技術(shù)大學(xué),高級(jí)工程師,博士,主要從事車聯(lián)網(wǎng)開(kāi)發(fā)和生態(tài)建設(shè)工作。
來(lái)源:《郵電設(shè)計(jì)技術(shù)》











評(píng)論